· Mohammad AbouElSherbini · 26 min read
Data Structures and Algorithms
It's is about finding efficient ways to store and retrieve data, to perform operations on data, and to solve specific problems
Data Structures and Algorithms
By: Mohammad AbouElSherbini
Think 💡
(How does Google search or Youtube work?)
Agenda
- Day 1
- Complexity analysis
- Divide and conquer
- Searching algorithms
- Sorting algorithms
- Day 2
- Array
- LinkedList
- Stack
- Queue
- Day 3
- Graph
- Tree
- BFS
- DFS
- Day 4
- Set
- Map
- Heap / Priority Queue
- Day 5
- Two pointers
- Sliding window
- Prefix sum
- Frequency array/map
Visualizations
- Data Structure Visualization (usfca.edu)
- Visualising data structures and algorithms through animation - VisuAlgo
Intro
How computers work
General purpose computers consist of 2 main components:
- Hardware components: physical electronics that include CPU, GPU, RAM, etc..
- Software components: instructions to these electronics which conveyed in a user friendly way by means of programing languages
With the evolution of electronic circuits it became easier to make a general purpose device that can change it’s functionality without having to change the hardware. but surely at the cost of less optimizations to each functionality.
So it’s very important to learn how to make good use of the instructions provided by the hardware.
Why learn
Problem Solving
- Critical Thinking: Enhances logical reasoning and breaking down complex problems.
- Adaptability: Prepares you for varied challenges.
- Foundation: Essential for advanced computer science topics.
Data Structures
- Efficient Data Management: Organize and manage data effectively.
- Performance Optimization: Optimize for specific operations (e.g., search, insert).
- Trade-offs: Choose the best structure for a problem.
Algorithms
- Systematic Methods: Provide structured problem-solving techniques.
- Efficiency: Write efficient and scalable code.
- Innovation: Explore new problem-solving approaches.
Practical Application
- Real-world Problems: Solve practical issues like network routing and data encryption.
- Software Development: Write clean, efficient, and maintainable code.
- Coding Interviews: Essential for technical job interviews.
What makes a good software
Software Engineering is a disciplined approach to the design, production, and maintenance of computer programs that are developed on time and within cost estimates, and utilizing tools that help to manage the size and complexity of the resulting software products.
Goals
- Works (that is, accomplishes its intended function)
- Can be read and understood
- Can be modified if necessary without much effort
- Is completed on time and within its budget.
Complexity analysis
Comparison of Algorithms:
- Correctness: judged by how close you are to the answer or how many you got right
- Runtime: judged by how long your code takes to run
- Memory: judged by how much space your code needs
Analysis of Algorithms
- Worst Case Analysis (Usually done): by calculating the upper bound(worst) of usages. annotated by
Big Onotations - Average Case Analysis (Sometimes done): by calculating the average of usages. annotated by
Big Theta (Θ)notations - Best Case Analysis (Never done): by calculating the lower bounds(best) of usages. annotated by
Big Omega (Ω)notations
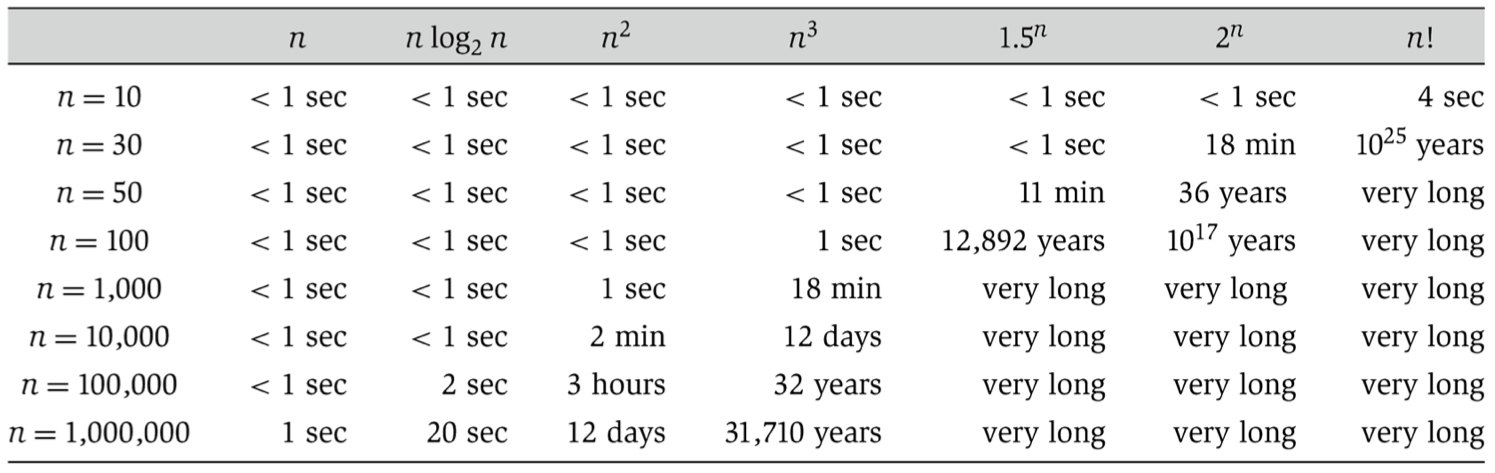
Estimating the Analysis
A simple way to get Big O notation of an expression is to drop low order terms and ignore leading constants (Why?). For example, consider the following expression.
- 3$n^3$ + 6$n^2$ + 6000 = O($n^3$)
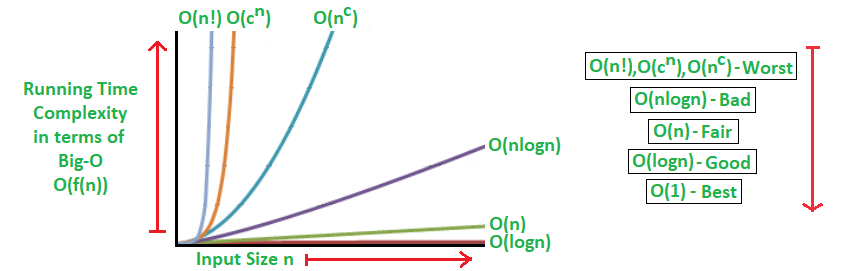
Analysis comparison
The common levels in order from best to worst:
- 0($1$): constant
- O($log_2(n)$): logarithmic
- O($n$): linear
- O($n^2$): quadratic
- O($n^3$): cubic
- O($2^n$): exponential
- O($n!$): factorial
Algorithms
Divide and conquer
- Idea: used to solve problems by dividing the main problem into subproblems, solving them individually and then merging them to find solution to the original problem
- Usual Complexity:
- Time: O($nlog_2(n)$)
- Space: O($n$)
Search Algorithms
Used to find one or more elements from a dataset.
We can achieve this using a linear search O(n) but with some extra information about the dataset we can further optimize the process
Examples:
- Linear Search (Sequential Search): Works on random data, O($n$)
- Binary Search: Works on sorted data, O($log_2(n)$)
- Exponential Search: Works on sorted data, O($log_2(n)$)
- Ternary Search: Works on sorted data, O($log_3(n)$)
- Interpolation Search: Works on sorted data, good on uniform data but otherwise O($n$)
Linear search (Sequential Search)
- Idea: iterate through the data one by one until you reach goal or dataset end
- Complexity:
- Time: O($n$)
- Space: O($1$)
int search(int arr[], int N, int x) {
for (int i = 0; i < N; i++)
if (arr[i] == x)
return i;
return -1;
}Binary search
- Assumption: dataset is sorted
- Idea: apply divide and conquer technique by dividing dataset into 2 segments, then checking the middle element to determine which segment to keep and which to discard, then repeat until you reach goal or dataset end
- Complexity:
- Time: O($log_2(n)$)
- Space: O($1$)
Iterative:
int binarySearch(int arr[], int low, int high, int x) {
while (low <= high) {
int mid = low + (high - low) / 2;
// Check if x is present at mid
if (arr[mid] == x)
return mid;
// If x is smaller, ignore right half
if (arr[mid] > x)
high = mid - 1;
// If x is greater, ignore left half
else
low = mid + 1;
}
// If we reach here, then element was not present
return -1;
}Recursive:
int binarySearch(int arr[], int low, int high, int x) {
if (high < low) return -1;
int mid = low + (high - low) / 2;
// Check if x is present at mid
if (arr[mid] == x)
return mid;
// If x is smaller, ignore right half
if (arr[mid] > x)
return binarySearch(arr, low, mid - 1, x);
// If x is greater, ignore left half
return binarySearch(arr, mid + 1, high, x);
}Labs
- Implement Sequential Search & Binary Search on array of integers & cstrings (4 total)
- 69. Sqrt(x)
- 441. Arranging Coins
Sort Algorithms
Used to organize a dataset in a certain order.
There are many Algorithms to achieve this but with varying complexities like:
- Selection Sort: O($n^2$)
- Bubble Sort: O($n^2$)
- Merge Sort: O($nlog_2(n)$)
- Insertion Sort: O($n^2$)
- Heap Sort: O($nlog_2(n)$)
- Quick Sort: Θ($nlog_2(n)$), O($n^2$)
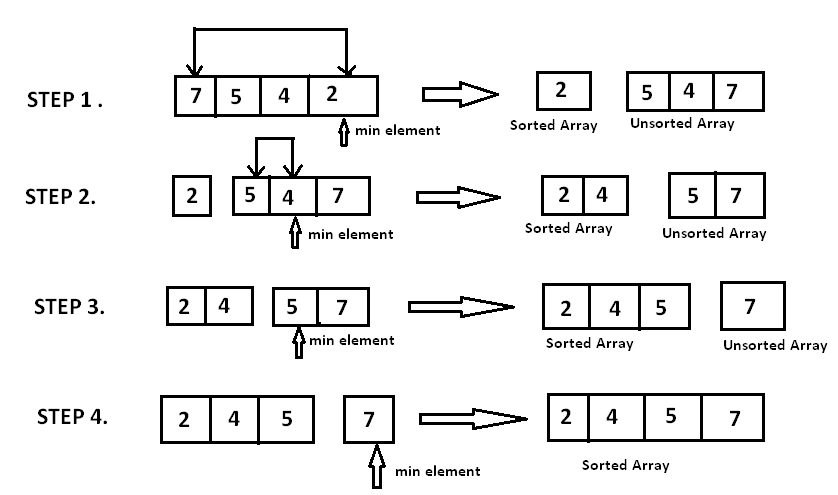
Selection sort
- Idea: repeatedly select the smallest (or largest) element from the unsorted portion of the list and move it to the end of the sorted portion of the list
- Complexity:
- Time: O($n^2$)
- Space: O($1$)
void selectionSort(int arr[], int n) {
int i, j, min_idx;
// One by one move boundary of
// unsorted subarray
for (i = 0; i < n - 1; i++) {
// Find the minimum element in
// unsorted array
min_idx = i;
for (j = i + 1; j < n; j++) {
if (arr[j] < arr[min_idx])
min_idx = j;
}
// Swap the found minimum element
// with the first element
if (min_idx != i)
swap(arr[min_idx], arr[i]);
}
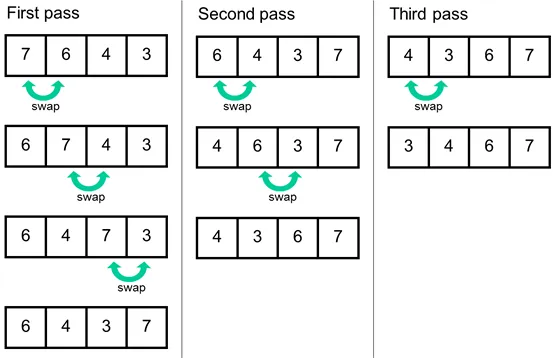
}Bubble sort
- Idea: repeatedly swap the adjacent elements if they are in the wrong order.
- Complexity:
- Time: O($n^2$)
- Space: O($1$)
void bubbleSort(int arr[], int n) {
int i, j;
bool swapped;
for (i = 0; i < n - 1; i++) {
swapped = false;
for (j = 0; j < n - i - 1; j++) {
if (arr[j] > arr[j + 1]) {
swap(arr[j], arr[j + 1]);
swapped = true;
}
}
// If no two elements were swapped
// by inner loop, then break
if (swapped == false)
break;
}
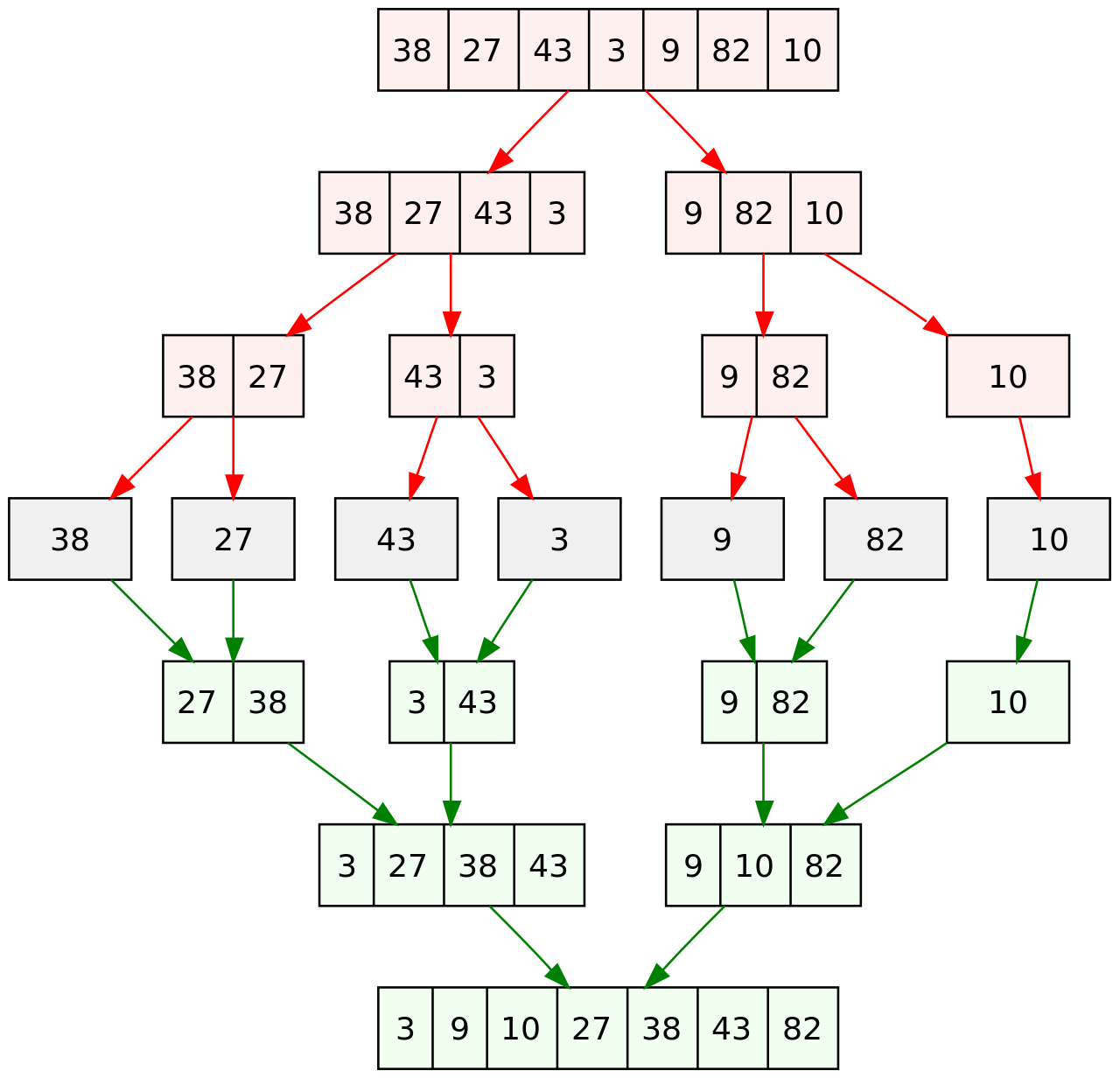
}Merge sort
- Idea: apply divide and conquer technique by repeatedly dividing the input array into smaller subarrays (halves) and sorting those subarrays then merging them back together to obtain the sorted array
- Complexity:
- Time: O($nlog_2(n)$)
- Space: O($n$)
void merge(int arr[], int l, int m, int r) {
// Create L ← A[l..m] and R ← A[m+1..r]
int n1 = m - l + 1;
int n2 = r - m;
int L[n1], R[n2];
for (int i = 0; i < n1; i++)
L[i] = arr[l + i];
for (int j = 0; j < n2; j++)
R[j] = arr[m + 1 + j];
// Maintain current index of sub-arrays and main array
int i=0, j=0, k=l;
// Until we reach either end of either L or M, pick larger among
// elements L and M and place them in the correct position at A[p..r]
while (i < n1 && j < n2) {
if (L[i] <= R[j]) {
arr[k] = L[i];
i++;
} else {
arr[k] = R[j];
j++;
}
k++;
}
// When we run out of elements in either L or M,
// pick up the remaining elements and put in A[p..r]
while (i < n1) {
arr[k] = L[i];
i++;
k++;
}
while (j < n2) {
arr[k] = R[j];
j++;
k++;
}
}
// Divide the array into two subarrays, sort them and merge them
void mergeSort(int arr[], int l, int r) {
if (l < r) {
// m is the point where the array is divided into two subarrays
int m = l + (r - l) / 2;
mergeSort(arr, l, m);
mergeSort(arr, m + 1, r);
// Merge the sorted subarrays
merge(arr, l, m, r);
}
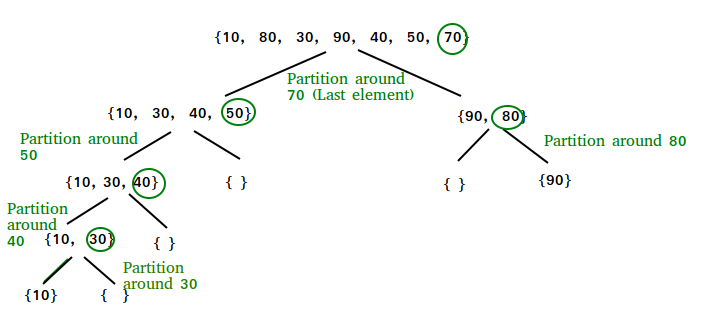
}Quick sort
- Idea: apply divide and conquer technique by repeatedly picking an elements as a pivot and partitioning the elements around it by comparing it to them
- Complexity:
- Time: Θ($nlog_2(n)$), O($n^2$)
- Space: O($1$)
void quickSort(int arr[], int low, int high)
{
// terminate if range is empty
if (low >= high)
return;
// choose the pivot
int pivot = arr[high];
// assume position for the pivot then move it until it reaches the correct sorted position in the array
int pi = low;
for (int j = low; j < high; j++) {
if (arr[j] < pivot) {
// add the element to the left side and move the pivot forward
swap(arr[pi], arr[j]);
pi++;
}
}
swap(arr[pi], arr[high]);
// repeat for the rest of the array
quickSort(arr, low, pi - 1);
quickSort(arr, pi + 1, high);
}Complexity Comparison summary
| Sorting Algorithm | Time Complexity Worst | Time Complexity Average | Time Complexity Best | Space Complexity | Stability |
|---|---|---|---|---|---|
| Bubble Sort | O(n^2) | O(n^2) | O(n) | O(1) | Stable |
| Selection Sort | O(n^2) | O(n^2) | O(n^2) | O(1) | Not Stable |
| Insertion Sort | O(n^2) | O(n^2) | O(n) | O(1) | Stable |
| Merge Sort | O(n log n) | O(n log n) | O(n log n) | O(n) | Stable |
| Quick Sort | O(n^2) | O(n log n) | O(n log n) | O(log n) | Not Stable |
| Heap Sort | O(n log n) | O(n log n) | O(n log n) | O(1) | Not Stable |
| Counting Sort | O(n+k) | O(n+k) | O(n+k) | O(k) | Stable |
| Radix Sort | O(nk) | O(nk) | O(nk) | O(n+k) | Stable |
- n is the number of elements in the input array.
- k is the range of the input (for Counting Sort and Radix Sort).
- Stability: A stable sorting algorithm maintains the relative order of records with equal keys.
Labs
- Implement Selection sort & Bubble sort & Merge sort on array of integers (3 total)
- 3011. Find if Array Can Be Sorted
- 88. Merge Sorted Array
- 912. Sort an Array
- 1637. Widest Vertical Area Between Two Points Containing No Points
Two pointers
- Idea: works by defining 2 iterators to loop through the data structure, allowing to look at 2 places at the same time
- Complexity:
- Time: O($n$)
- Space: O($1$)
bool hasPairSum(vector<int>& arr, int n, int target) {
// represents first pointer
int i = 0;
// represents second pointer
int j = n - 1;
while (i < j) {
// If we find a pair
if (arr[i] + arr[j] == target)
return true;
// If sum of elements at current pointers is less,
// we move towards higher values
else if (arr[i] + arr[j] < target)
i++;
// If sum of elements at current pointers is more,
// we move towards lower values
else
j--;
}
return false;
}Labs
Sliding window
- Idea: works by defining 2 iterators to loop through the data structure. allowing to look at the range in between, usual the 2nd iterator adds elements to the range while the 1st removes them
- Complexity:
- Time: O($n$)
- Space: O($1$)
int maxSum(int arr[], int n, int k) { // k is window size
// Compute sum of first window of size k
int max_sum = 0;
for (int i = 0; i < k; i++)
max_sum += arr[i];
// Compute sums of remaining windows by removing first element of previous
// window and adding last element of current window.
int window_sum = max_sum;
for (int i = k; i < n; i++) {
window_sum += arr[i] - arr[i - k];
max_sum = max(max_sum, window_sum);
}
return max_sum;
}Labs
- 3. Longest Substring Without Repeating Characters
- 1208. Get Equal Substrings Within Budget
- 1652. Defuse the Bomb
- Maximum Average Subarray I
- 1456. Maximum Number of Vowels in a Substring of Given Length
Prefix sum
- Idea: cache all previous sums to be able to calculate sum of ranges in O(1)
- Complexity:
- Time: O($n$) for build, O(1) for use
- Space: O($n$)
void fillPrefixSum(int arr[], int n) {
int prefixSum[n];
prefixSum[0] = arr[0];
// Adding present element with previous element
for (int i = 1; i < n; i++)
prefixSum[i] = prefixSum[i - 1] + arr[i];
}Labs
Frequency array/map
- Idea: count the frequency of elements either by using array index or map
- Complexity:
- Time: O($n$)
- Space: O($k$), where
kis the range of values
void fillFrequencyArray(int arr[], int n, int k) {
int freq[k] = {0}; // k is 26 for single case alphabet, 58 for both cases
// count elements
for (int i = 0; i < n; i++)
freq[arr[i]]++;
}Labs
- 771. Jewels and Stones
- 1160. Find Words That Can Be Formed by Characters
- 3541. Find Most Frequent Vowel and Consonant
Graph
Breadth First Search(BFS)
- Idea: iterate through the graph level by level
- Usual Complexity:
- Time: O($n$)
- Space: O($m$), where
mis max number of elements in a level
void bfs(TreeNode* root) {
queue<TreeNode*> q;
q.push(root);
int lvl = 0;
while (!q.empty()) {
int c = size(q);
lvl++;
while (c--) {
auto cur = q.front();
q.pop();
if (cur->left)
q.push(cur->left);
if (cur->right)
q.push(cur->right);
cout << cur->val << endl;
}
}
}Labs
- 104. Maximum Depth of Binary Tree
- 513. Find Bottom Left Tree Value
- 1379. Find a Corresponding Node of a Binary Tree in a Clone of That Tree
Depth First Search(DFS)
- Idea: iterate through the graph by visiting the deepest elements first
- Usual Complexity:
- Time: O($n$)
- Space: O($d$), where
dis max depth of the graph
Iterative:
void dfs(TreeNode* root) {
stack<TreeNode*> q;
q.push(root);
while (!q.empty()) {
auto cur = q.top();
q.pop();
if (cur->left)
q.push(cur->left);
if (cur->right)
q.push(cur->right);
cout << cur->val << endl;
}
}Recursive:
void dfs(TreeNode* node) {
if(!node) return;
cout << node->val << endl;
dfs(node->right), dfs(node->left);
}Labs
- 104. Maximum Depth of Binary Tree
- 513. Find Bottom Left Tree Value
- 1379. Find a Corresponding Node of a Binary Tree in a Clone of That Tree
Labs (bonus)
Diameter
- Idea: find the distance between the 2 farthest nodes
- Complexity:
- Time: O($n$)
- Space: O($n$)
- Demo: 3203. Find Minimum Diameter After Merging Two Trees
Using double DFS/BFS
BFS/DFS to find the farthest node from a random node, then another BFS/DFS to find the farthest node from found node and calculate the distance in between
int calcDia(vector<vector<int>>&& adj) {
int x;
queue<pair<int, int>> q;
q.push({0, -1});
while (!empty(q)) {
x = q.front().first;
int c = size(q);
while (c--) {
auto [i, p] = q.front();
q.pop();
for (auto j : adj[i]) {
if (j != p)
q.push({j, i});
}
}
}
int dia = -1;
q.push({x, -1});
while (!empty(q)) {
dia++;
int c = size(q);
while (c--) {
auto [i, p] = q.front();
q.pop();
for (auto j : adj[i]) {
if (j != p)
q.push({j, i});
}
}
}
return dia;
}Using 1 DFS
The longest diameter has to pass through a node, so maximize on the longest path passing through each node
int f(vector<vector<int>>& adj, int i, int p, int& d) {
int mx = 0, mx2 = 0;
for (auto j : adj[i]) {
if (j == p)
continue;
int ret = 1 + f(adj, j, i, d);
if (ret > mx)
mx2 = mx, mx = ret;
else if (ret > mx2)
mx2 = ret;
}
d = max(d, mx + mx2);
return mx;
}Backtracking
- Idea: try all possible solutions by backtracking steps and retrying
- Complexity:
- Time: O($2^n$), or O($n!$)
- Space: O($1$), or O($n$) if keeping track of visits
- Demo: 46. Permutations
void permutations(vector<int>& nums, vector<vector<int>>& ans, vector<int> row) {
if (row.size() == nums.size()) return ans.push_back(row);
for (int i = 0; i < nums.size(); i++) {
if (find(begin(row), end(row), nums[i]) == end(row)) {
row.push_back(nums[i]); // do
permutations(nums, ans, row);
row.pop_back(); // undo
}
}
}Floyd-Warshall’s All Pairs Shortest Path
- Idea: Relax the graph to find the shortest path between all pairs by trying intermediate steps
- Complexity:
- Time: O($n^3$)
- Space: O($n2$) to store results
- Demo: 2976. Minimum Cost to Convert String I
void floyd(vector<vector<int>>& minCost) {
for (size_t k = 0; k < 26; k++) {
for (size_t i = 0; i < 26; i++) {
for (size_t j = 0; j < 26; j++) {
minCost[i][j] = min(minCost[i][j], minCost[i][k] + minCost[k][j]);
}
}
}
}Dijkstra’s algorithm
- Idea: Relax the graph to find the shortest path from 1 node to all others by composing it of other shortest paths (the shortest path contains the shortest intermediate paths)
- Complexity:
- Time: O($E*log(V)$), Where E is the number of edges and V is the number of vertices
- Space: O($V$)
void dijkstra(vector<vector<pair<int, int>>> adj, int src){
int n = size(adj);
priority_queue<pair<int, int>, vector<pair<int, int>>, greater<pair<int, int>>> pq;
vector<int> dist(n, INT_MAX);
// update the source info
pq.push({ 0, src });
dist[src] = 0;
// Loop till empty (no more min dist to relax with)
while (!empty(pq)) {
// relax using the min dist
int i = pq.top().second;
pq.pop();
for (auto& [j, w] : adj[i]) {
// update if this is a better path than the previous
if (dist[j] > dist[i] + w) {
dist[j] = dist[i] + w;
pq.push({ dist[j], j });
}
}
}
}Labs
Dynamic Programing
- Idea: like backtracking but with memoization(saving results of visited subsets/states)
- Complexity:
- Time: O($n$)
- Space: O($n$)
- Demo: 72. Edit Distance
Recursion:
int minDistance(string word1, string word2) {
const int OO = 1e8;
int n = size(word1), m = size(word2);
vector<vector<int>> mem(n, vector<int>(m, -1));
function<int(int, int)> f = [&](int i, int j) -> int {
if (i >= n)
return m - j;
if (j >= m)
return n - i;
if (mem[i][j] != -1)
return mem[i][j];
if (word1[i] == word2[j])
return f(i + 1, j + 1);
int ret = OO;
ret = min(ret, 1 + f(i + 1, j));
ret = min(ret, 1 + f(i, j + 1));
ret = min(ret, 1 + f(i + 1, j + 1));
return mem[i][j] = ret;
};
return f(0, 0);
}Tabulation:
int minDistance(string word1, string word2) {
const int OO = 1e8;
int n = size(word1), m = size(word2);
vector<vector<int>> mem(n + 1, vector<int>(m + 1, 0));
for (size_t i = 0; i < n; i++)
mem[i][m] = n - i;
for (size_t j = 0; j < m; j++)
mem[n][j] = m - j;
for (int i = n - 1; i >= 0; i--) {
for (int j = m - 1; j >= 0; j--) {
int ret = OO;
if (word1[i] == word2[j])
ret = min(ret, mem[i + 1][j + 1]);
else {
ret = min(ret, 1 + mem[i + 1][j]);
ret = min(ret, 1 + mem[i][j + 1]);
ret = min(ret, 1 + mem[i + 1][j + 1]);
}
mem[i][j] = ret;
}
}
return mem[0][0];
}Space optimization:
int minDistance(string word1, string word2) {
const int OO = 1e8;
int n = size(word1), m = size(word2);
vector<vector<int>> mem(2, vector<int>(m + 1, 0));
bool cur = 0, other = 1;
for (size_t j = 0; j < m; j++)
mem[other][j] = m - j;
for (int i = n - 1; i >= 0; i--) {
mem[cur][m] = n - i;
for (int j = m - 1; j >= 0; j--) {
int ret = OO;
if (word1[i] == word2[j])
ret = min(ret, mem[other][j + 1]);
else {
ret = min(ret, 1 + mem[other][j]);
ret = min(ret, 1 + mem[cur][j + 1]);
ret = min(ret, 1 + mem[other][j + 1]);
}
mem[cur][j] = ret;
}
other = cur;
cur = !cur;
}
return mem[other][0];
}Labs
- 70. Climbing Stairs
- 322. Coin Change
- 198. House Robber
- 300. Longest Increasing Subsequence
- 1671. Minimum Number of Removals to Make Mountain Array
Monotonic Stack
- Idea: maintain elements in either increasing or decreasing order to easily find the next greater or smaller element
- Complexity:
- Time: O($n$)
- Space: O($n$)
- Demo: 1475. Final Prices With a Special Discount in a Shop
vector<int> finalPrices(vector<int>& prices) {
int n = size(prices);
stack<int> st;
for (int i = n - 1; i >= 0; i--) {
while (!empty(st) && st.top() > prices[i]) {
st.pop();
}
int deal = empty(st) ? 0 : st.top();
st.push(prices[i]);
prices[i] -= deal;
}
return prices;
}Labs
KMP Pattern Searching
- Idea: efficiently identifies patterns within text by employing a Prefix Table / LPS (Longest Proper Prefix which is also Suffix) Table
- Complexity:
- Time: O($n+m$)
- Space: O($m$)
- Demo: Print matches’ starting point
- Ref: https://www.scaler.in/kmp-algorithm/
string solution(string s, string pattern) {
int n = size(s), m = size(pattern);
// lps
vector<int> lps(m);
lps[0] = 0;
int len = 0;
for (int i = 1; i < m;) {
if (pattern[i] == pattern[len]) {
lps[i] = ++len;
i++;
} else {
if (len == 0) {
lps[i] = 0;
i++;
} else {
len = lps[len - 1];
}
}
}
// kmp
int i = 0, j = 0;
while (i < n) {
if (s[i] == pattern[j]) {
i++, j++;
if (j == m) {
Printer::print(i - j);
j = lps[j - 1];
}
} else {
if (j == 0) {
i++;
} else {
j = lps[j - 1];
}
}
}
}Labs
Data structures
is a systematic way of organizing data for efficient usage.
Main operations:
- Random access
- Search
- Insert
- Delete
Each data structure has varying efficiencies with each operation and it’s all about trade-offs so we must carefully select the best candidate for our use case
Array
- Concept: a contiguous block of memory is reserved to store blocks of data
- Runtime Complexity
- Random access: O(1)
- Search: O(n), (worst case, if target is at the end)
- Insert: O(n), (worst case, if inserting at the beginning or middle, shifting elements is required)
- Delete: O(n), (worst case, if deleting from the beginning or middle, shifting elements is required)
Dynamic Array
- Concept: an Array that can be resized, when elements reach a certain usage percent and expands by a certain percent of size
- Runtime Complexity
- Random access: O(1)
- Search: O(n), (worst case, if target is at the end)
- Insert: amortized O(1), but O(n) worst case
- Delete: O(n), (worst case, if deleting from the beginning or middle, shifting elements is required)
Labs
LinkedList / Doubly LinkedList
- Concept: blocks of data are chained together to form a list
- Runtime Complexity
- Random Access: O(n) (sequential access required)
- Search: O(n)
- Insert: O(1) (if inserting at the head or given a reference to a node)
- Delete: O(1) (if given a reference to the node to be deleted)
// Node class
class Node {
public:
int data;
Node* prev;
Node* next;
Node(int data) : data(data), prev(nullptr), next(nullptr) {}
};
// DoublyLinkedList class
class DoublyLinkedList {
private:
Node* head;
Node* tail;
public:
DoublyLinkedList() : head(nullptr), tail(nullptr) {}
// Function to get the length of the list
int getLength() const {
int length = 0;
Node* current = head;
while (current != nullptr) {
++length;
current = current->next;
}
return length;
}
// Function to insert at the front
void insertFront(int data) {
Node* newNode = new Node(data);
if (head == nullptr) {
head = tail = newNode;
} else {
newNode->next = head;
head->prev = newNode;
head = newNode;
}
}
// Function to insert at the back
void insertBack(int data) {
Node* newNode = new Node(data);
if (tail == nullptr) {
head = tail = newNode;
} else {
newNode->prev = tail;
tail->next = newNode;
tail = newNode;
}
}
// Function to insert at a specific position
void insertAtPosition(int data, int position) {
if (position <= 0) {
insertFront(data);
return;
}
int length = getLength();
if (position >= length) {
insertBack(data);
return;
}
Node* newNode = new Node(data);
Node* current = head;
for (int i = 0; i < position - 1; ++i) {
current = current->next;
}
newNode->next = current->next;
newNode->prev = current;
if (current->next != nullptr) {
current->next->prev = newNode;
}
current->next = newNode;
}
// Function to delete a node with a specific value
void deleteNode(int data) {
Node* current = head;
while (current != nullptr && current->data != data) {
current = current->next;
}
if (current == nullptr) {
std::cout << "Node with value " << data << " not found." << std::endl;
return;
}
if (current->prev != nullptr) {
current->prev->next = current->next;
} else {
head = current->next;
}
if (current->next != nullptr) {
current->next->prev = current->prev;
} else {
tail = current->prev;
}
delete current;
}
// Function to print the list from front to back
void printForward() const {
Node* current = head;
while (current != nullptr) {
std::cout << current->data << " ";
current = current->next;
}
std::cout << std::endl;
}
// Function to print the list from back to front
void printBackward() const {
Node* current = tail;
while (current != nullptr) {
std::cout << current->data << " ";
current = current->prev;
}
std::cout << std::endl;
}
// Destructor to free memory
~DoublyLinkedList() {
Node* current = head;
while (current != nullptr) {
Node* next = current->next;
delete current;
current = next;
}
}
};
Labs
- implement LinkedList on integers
- 206. Reverse Linked List
- 876. Middle of the Linked List
- 1290. Convert Binary Number in a Linked List to Integer
Queue
- Concept: you draw the first block of data you insert, first in first out (FIFO)
- Runtime Complexity
- Random Access: O(n) (if implemented with a linked list, needs traversal)
- Enqueue: O(1)
- Dequeue: O(1)
// Define the default capacity of a queue
const int MAX_SIZE = 5; // Maximum size of the stack
// A class to store a queue
class Queue {
int *arr; // array to store queue elements
int capacity; // maximum capacity of the queue
int front; // front points to the front element in the queue (if any)
int rear; // rear points to the last element in the queue
int count; // current size of the queue
public:
Queue(int size = MAX_SIZE); // constructor
~Queue(); // destructor
int dequeue();
void enqueue(int x);
int peek();
int size();
bool isEmpty();
bool isFull();
};
// Constructor to initialize a queue
Queue::Queue(int size) {
arr = new int[size];
capacity = size;
front = 0;
rear = -1;
count = 0;
}
// Destructor to free memory allocated to the queue
Queue::~Queue() {
delete[] arr;
}
// Utility function to return the size of the queue
int Queue::size() {
return count;
}
// Utility function to check if the queue is empty or not
bool Queue::isEmpty() {
return (size() == 0);
}
// Utility function to check if the queue is full or not
bool Queue::isFull() {
return (size() == capacity);
}
// Utility function to dequeue the front element
int Queue::dequeue() {
// check for queue underflow
if (isEmpty())
{
cout << "Underflow\nProgram Terminated\n";
exit(EXIT_FAILURE);
}
int x = arr[front];
cout << "Removing " << x << endl;
front = (front + 1) % capacity;
count--;
return x;
}
// Utility function to add an item to the queue
void Queue::enqueue(int item) {
// check for queue overflow
if (isFull())
{
cout << "Overflow\nProgram Terminated\n";
exit(EXIT_FAILURE);
}
cout << "Inserting " << item << endl;
rear = (rear + 1) % capacity;
arr[rear] = item;
count++;
}
// Utility function to return the front element of the queue
int Queue::peek() {
if (isEmpty())
{
cout << "Underflow\nProgram Terminated\n";
exit(EXIT_FAILURE);
}
return arr[front];
}
Labs
- implement Queue using Array & LinkedList on integers
- 2073. Time Needed to Buy Tickets
- 225. Implement Stack using Queues
- 933. Number of Recent Calls
Stack
- Concept: you draw the last block of data you insert, last in first out (LIFO)
- Runtime Complexity
- Random Access: O(n) (if implemented with a linked list, needs traversal)
- Push: O(1)
- Pop: O(1)
const int MAX_SIZE = 5; // Maximum size of the stack
class Stack {
private:
int arr[MAX_SIZE];
int top;
public:
Stack() { top = -1;} // Initialize top to -1 to indicate an empty stack
bool isEmpty() { return (top == -1);}
bool isFull() { return (top == MAX_SIZE - 1);}
void push(int element) {
if (!isFull()) {
top++;
arr[top] = element;
std::cout << "Pushed element: " << element << " onto the stack.\n";
} else {
std::cout << "Stack is full. Cannot push element " << element << ".\n";
}
}
void pop() {
if (!isEmpty()) {
int poppedElement = arr[top];
top--;
std::cout << "Popped element: " << poppedElement << " from the stack.\n";
} else {
std::cout << "Stack is empty. Cannot pop from an empty stack.\n";
}
}
int topElement() {
if (!isEmpty()) {
return arr[top];
} else {
std::cout << "Stack is empty.\n";
return -1; // In this example, we consider -1 as an invalid value.
}
}
};Labs
- implement Stack using Array & LinkedList on integers
- 20. Valid Parentheses
- 1021. Remove Outermost Parentheses
- 1614. Maximum Nesting Depth of the Parentheses
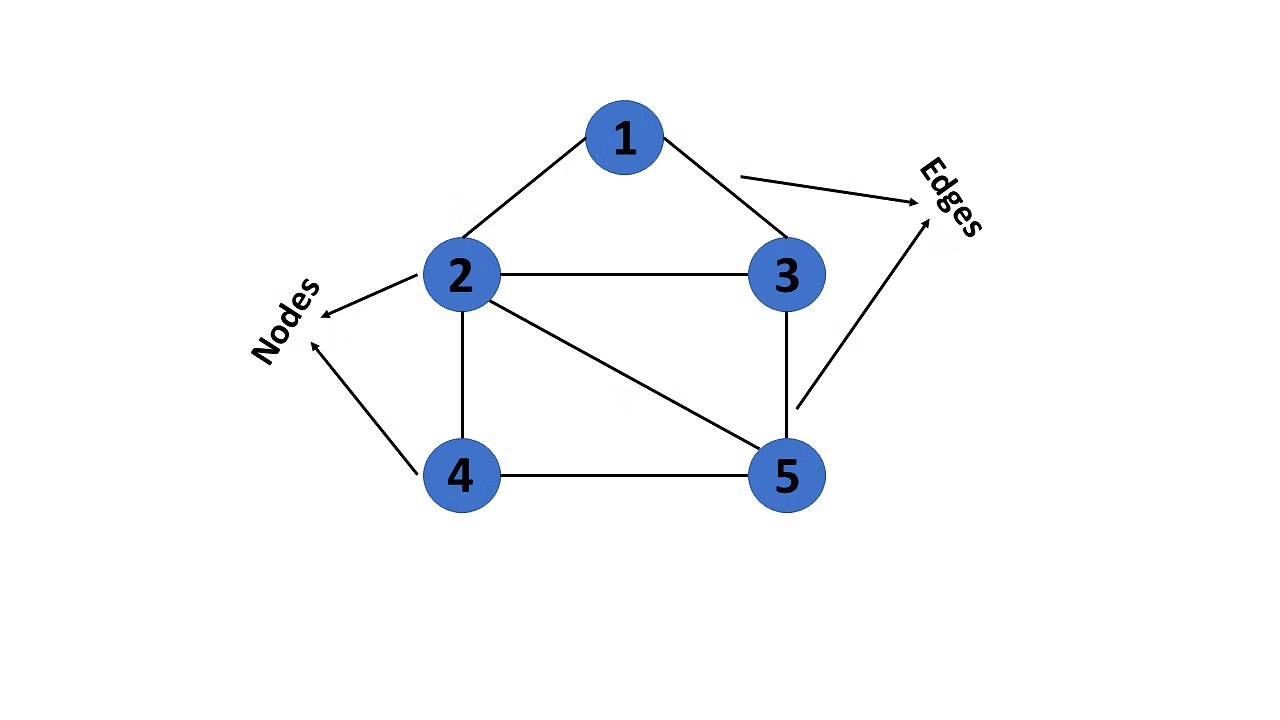
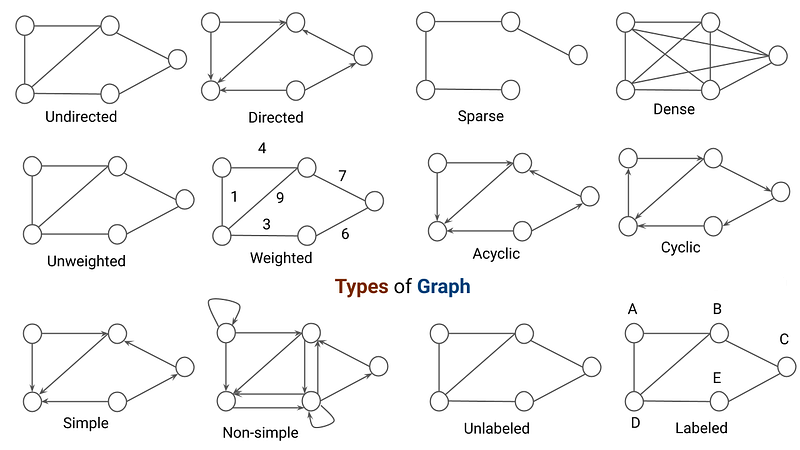
Graph
- Concept: blocks of data are called node and the relationships between them are represented by edge connecting 2 nodes
- Runtime Complexity
- Random Access: O(n)
- Search: O(n)
- Insert: O(n)
- Delete: O(n)
- Terminology:
- Node: basic building block of Graph
- Edge: the linking between 2 nodes
- Path: the sequence of nodes along the edges of a Graph
- Root: a topmost node in a Graph from which edges originate
- Leaf: a node that has no children
- Parent: a predecessor of a node
- Child: a successor of a node
- Sibling: shares the same parent
- Grandparent: parent of parent
- Grandchild: child of child
- Ancestor: parents of parents or parents of parents of parents and so on
- Descendant: children of children or children of children of children and so on
- Degree: number of edges connected to the node
- InDegree: number of edges coming into the node
- OutDegree: number of edges leaving the node
- Isolated node: a Node with a Degree of 0
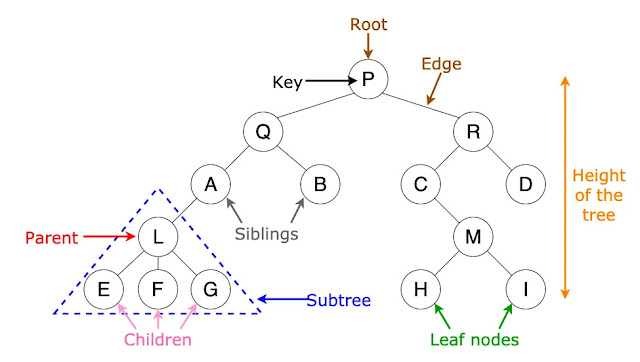
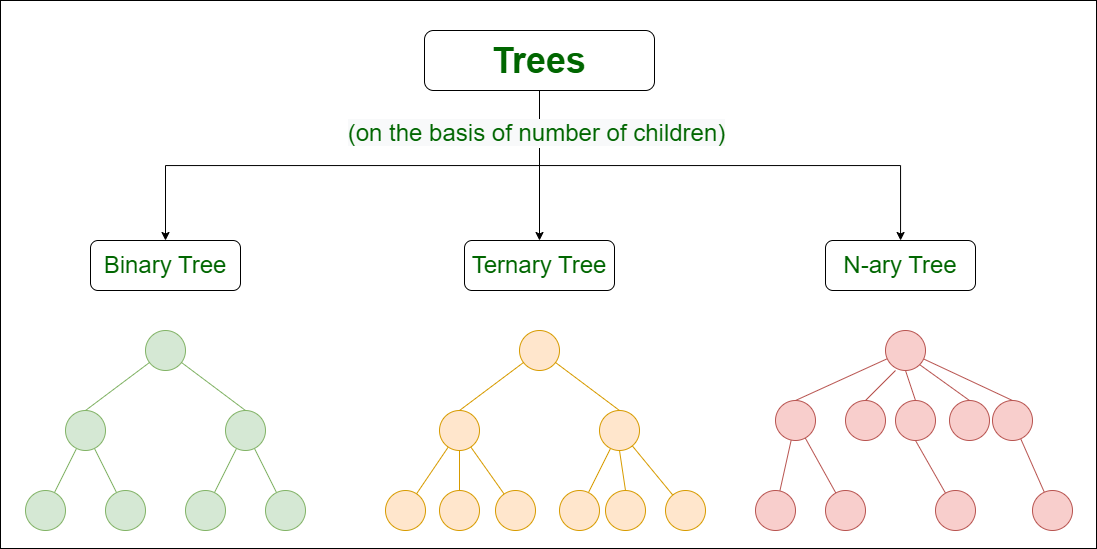
Tree
- Concept: is a Directed Acyclic Graph with each node having only 1 parent
- Runtime Complexity
- Random Access: O(n)
- Search: O(n)
- Insert: O(n)
- Delete: O(n)
- Terminology:
- Root: the topmost node in a Tree
- Height: number of edges on the longest path from the root to a leaf
- Level/Depth: its distance from the root
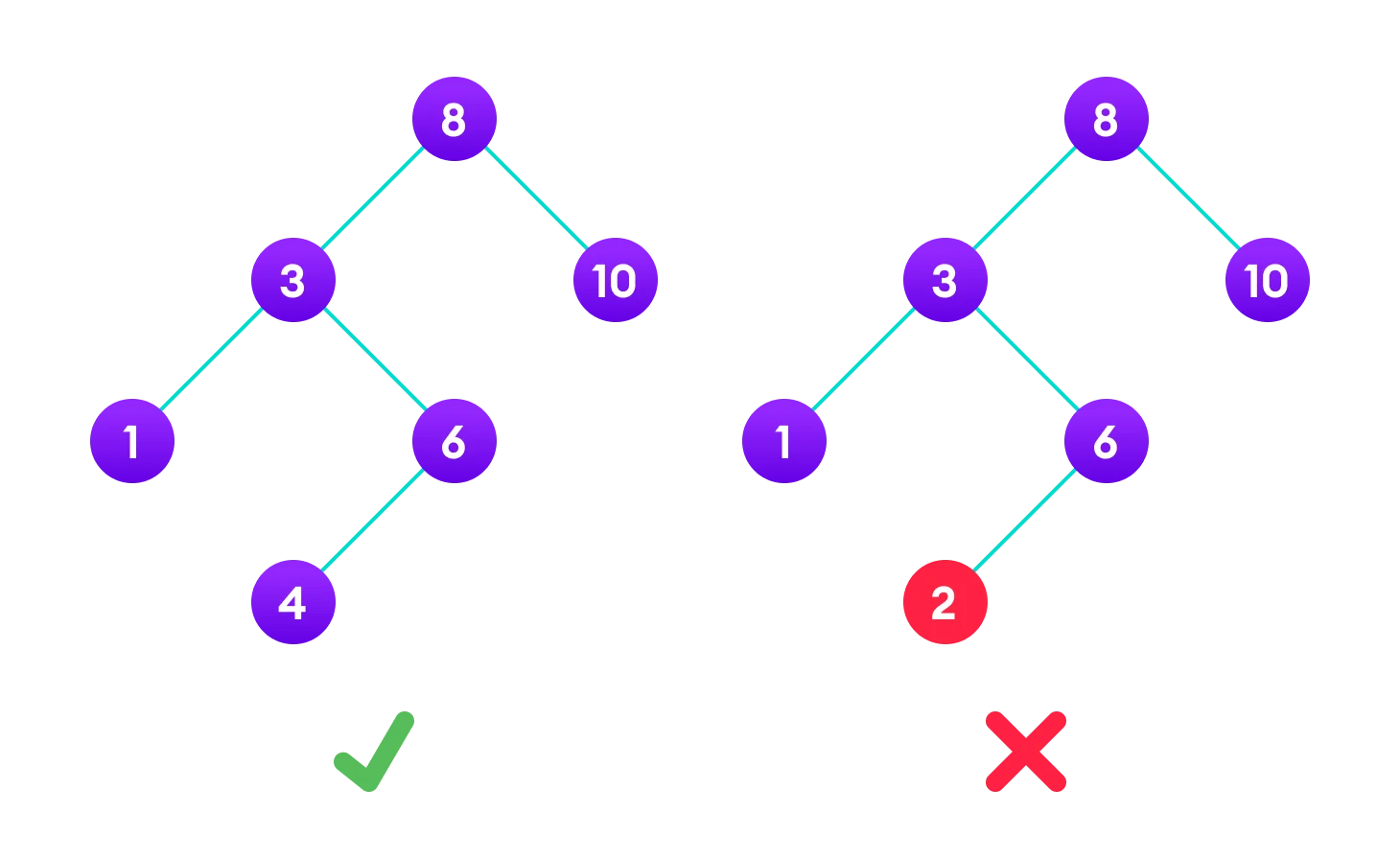
Binary Search Tree
- Concept: a binary tree where every node in the left subtree is less than the parent, and every node in the right subtree is of a value greater than the parent
- Runtime Complexity
- Random Access: O(log n) average, O(n) worst case (unbalanced tree)
- Search: O(log n) average, O(n) worst case (unbalanced tree)
- Insert: O(log n) average, O(n) worst case (unbalanced tree)
- Delete: O(log n) average, O(n) worst case (unbalanced tree)
Labs
- 938. Range Sum of BST
- 108. Convert Sorted Array to Binary Search Tree
- 700. Search in a Binary Search Tree
Set
- Concept: stores unique blocks of data
- Type:
- HashSet: unsorted set (fastest)
- TreeSet: sorted set
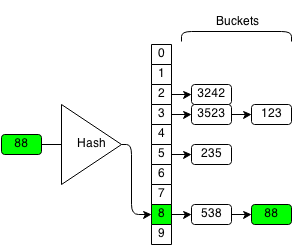
HashSet
- Concept: A Set built using a hash table to store and retrieve data by hash
- Runtime Complexity
- Random Access: Not supported. HashSet does not maintain any order of elements, and it does not provide a method to access elements by index.
- Search: O(1) average, O(n) worst-case due to hash collisions.
- Insert: O(1) average, O(n) worst-case due to hash collisions.
- Delete: O(1) average, O(n) worst-case due to hash collisions.
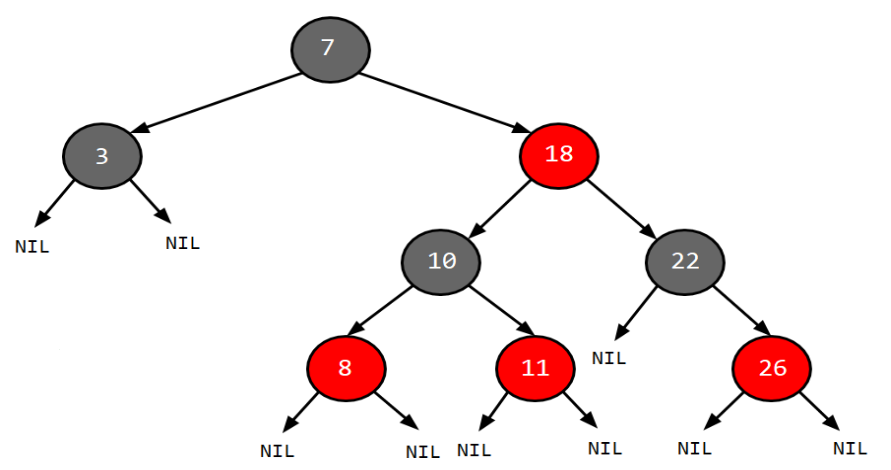
TreeSet
- Concept: a Set where data is sorted (built based on a Red-Black tree)
- Runtime Complexity
- Random Access: Not supported. TreeSet does not maintain an index-based structure.
- Search: O(log n)
- Insert: O(log n)
- Delete: O(log n)
Labs
Map
- Concept: stores data in pairs of key & value, with key being unique and the value representing a block of data
- Type:
- HashMap: unsorted map (fastest)
- TreeMap: sorted map
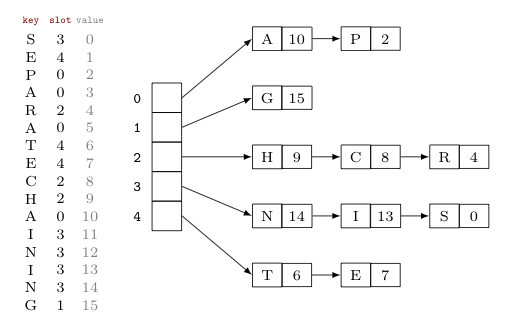
HashMap
- Concept: a Map built using a hash table to store and retrieve keys by hash
- Runtime Complexity
- Random Access: O(1) average, O(n) worst case (if many collisions)
- Search: O(1) average, O(n) worst case (if many collisions)
- Insert: O(1) average, O(n) worst case (if resizing is required)
- Delete: O(1) average, O(n) worst case (if many collisions)
TreeMap
- Concept: a Map where keys are sorted (built based on a Red-Black tree)
- Runtime Complexity
- Random Access: Not supported. TreeMap does not maintain an index-based structure.
- Search: O(log n)
- Insert: O(log n)
- Delete: O(log n)
Labs
- 811. Subdomain Visit Count
- 205. Isomorphic Strings
- 1512. Number of Good Pairs
- 884. Uncommon Words from Two Sentences
- 535. Encode and Decode TinyURL
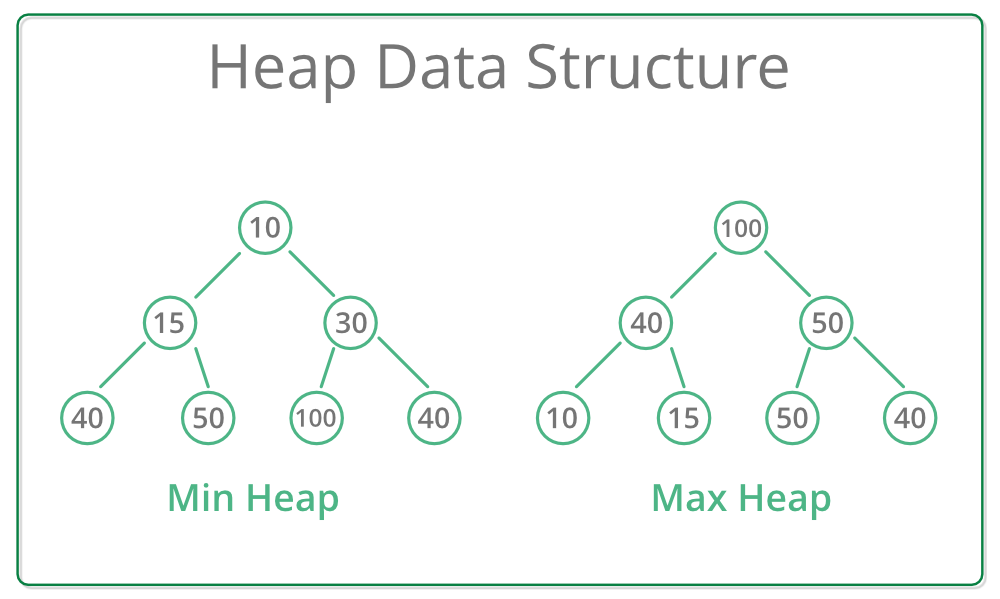
Heap / Priority Queue
- Concept: a Balanced binary tree where for every node the values of its children is less than or equal to its own value, (can also customize this comparison)
- Runtime Complexity
- Random Access (find min/max): O(1)
- Search: O(n)
- Insert: O(log n)
- Delete: O(log n) (removing the root and reheapifying)
Labs
- 2530. Maximal Score After Applying K Operations
- 1046. Last Stone Weight
- 2558. Take Gifts From the Richest Pile
- 2974. Minimum Number Game
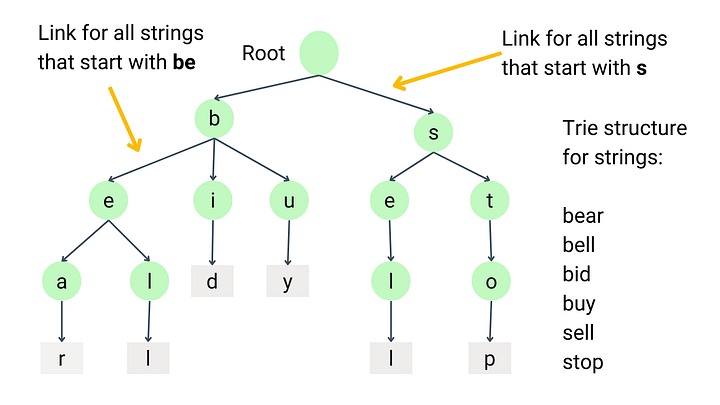
Prefix Tree (Trie)
- Concept: a Tree for storing and retrieving strings efficiently by connecting letters in chains
- Runtime Complexity
- Random Access: Not applicable. Tries are not designed for direct index-based access to elements.
- Search: O(m), where m is the length of the string being searched.
- Insert: O(m), where m is the length of the string being inserted.
- Delete: O(m), where m is the length of the string being deleted.
Labs
- 208. Implement Trie (Prefix Tree)
- 1268. Search Suggestions System
- 3042. Count Prefix and Suffix Pairs I
Complexity Comparison summary
| Data Structure | Random Access | Search | Insert | Delete |
|---|---|---|---|---|
| Array | O(1) | O(n) | O(n) | O(n) |
| Linked List | O(n) | O(n) | O(1) | O(1) |
| Queue | O(n) | O(n) | O(1) | O(1) |
| Stack | O(n) | O(n) | O(1) | O(1) |
| BST | O(log n)* | O(log n)* | O(log n)* | O(log n)* |
| HashSet | Not supported | O(1)** | O(1)** | O(1)** |
| TreeSet | Not supported | O(log n) | O(log n) | O(log n) |
| HashMap | O(1)** | O(1)** | O(1)** | O(1)** |
| TreeMap | Not supported | O(log n) | O(log n) | O(log n) |
| Heap | O(1) | O(n) | O(log n) | O(log n) |
*BST complexities are average cases; worst-case scenarios (unbalanced) are O(n)**HashSet and HashMap complexities are average cases; worst-case scenarios with many collisions are O(n)